
Jacobs University Robotics is equipped with special testing facilities for mobile robots. They are mainly used for evaluating search and rescue robots, but they provide standardized test elements for a large variety of locomotion, perception and world modeling challenges for mobile robots in general.

One testsite is the so-called basic rescue arena. It is particularly suited for testing 3D locomotion and sensing capacities of mobile robots. This testbed consists of three different levels, the so-called yellow, red, and the orange zone. This approach is modeled after the test arena design from the American National Institute for Standards and Technology (NIST), which is based on data from real disasters and accidents. This approach of the NIST arenas has also been already used in the RoboCup rescue competitions from 2001 on. In addition to using the NIST test elements for performance evaluations, own research contributions include especially work on map evaluations.

Yellow models an intact building structure with a normal office or home interior that has been mildly affected by the disaster. In the orange zone, the effects to the interior as well as to the building itself are much more severe. Last but not least, the red zone is a model of a pancake collapse with large amount of rubble and highly instable structures.
The Jacobs University arena is an extension of the concepts of the NIST arena. One particular feature is its compactness as it is based on a high bay racking system. This allows to have a large floor-space and many different levels. The arena has a footprint of 5.60m by 4.70m and it is approximately 6m high. It has 3 main floors and several intermediate floors, which are interconnected.

The opening of the basic Jacobs University rescue arena was in Spring 2004. It was supplemented in 2006 with the so-called Mobile Robot Test Arena. This second test arena provides a large collection of locomotion and sensing challenges that supplement the original 3D arena. The mobile test arena is mainly organized in a flat, 2D fashion. It features according test elements like maze-like structures, but also some local 3D obstacles like ramps, stairs and elevated floors. It also offers a large collection of random step fields, i.e., test elements that realistically simulate various forms of ruble. This arena is suited for testing the whole range of approaches from tele-operated to fully autonomous robots.
Both arenas are mainly targeted for training and testing purposes in the context of Safety, Security and Rescue Robotics. They are hence equipped with a variety of obstacles related to disasters and accidents as well as components to simulate various features of human victims like according form, motion, sound or respiration.
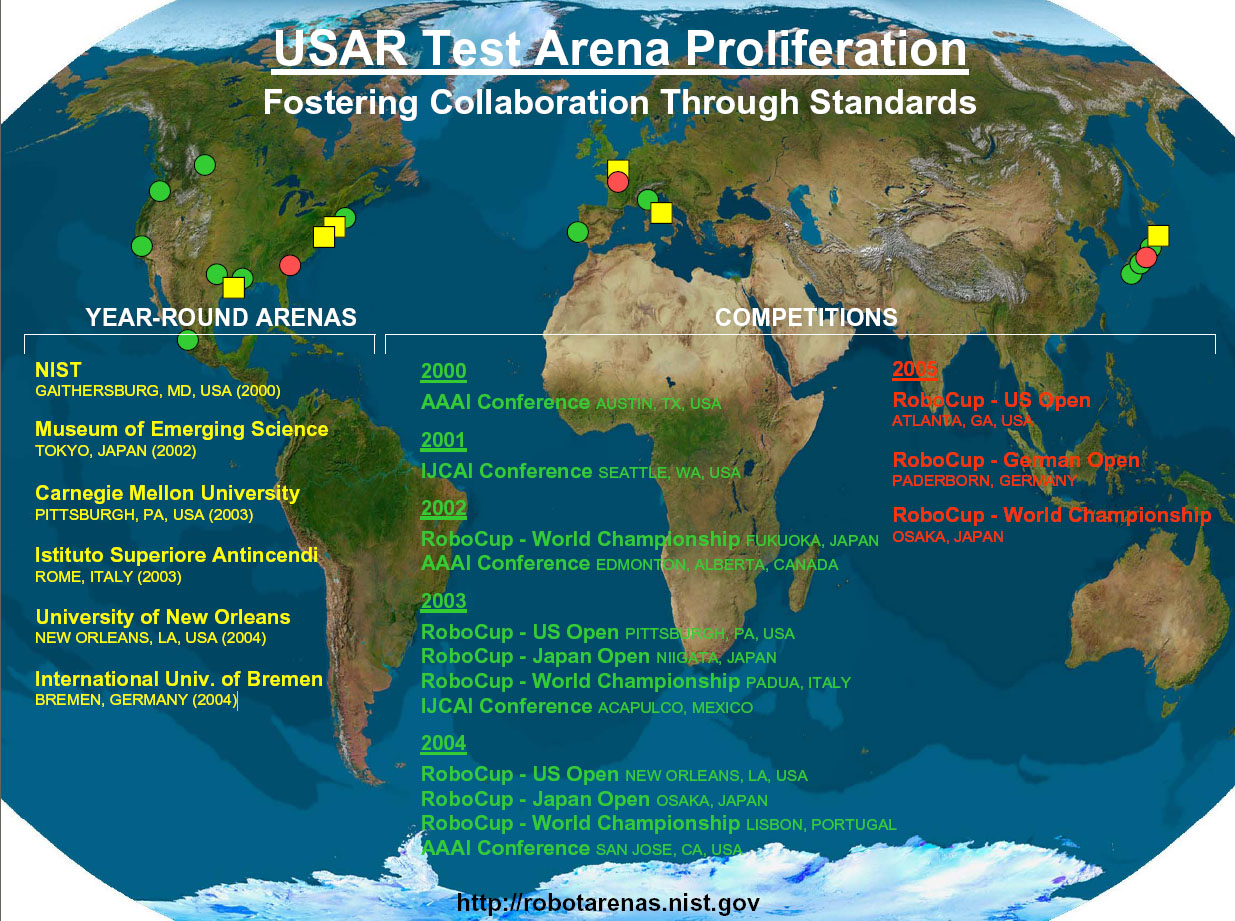
The mobile robot test facilities at Jacobs are based on joined work with the Intelligent Systems Division (ISD) of the US National Institute of Standards and Technologies (NIST). There are in total six permanent test-arenas in the world as can be seen on the following map from the NIST.
Both test arenas are supplemented by the robot prototyping lab where the actual robot developments take place. The “3D Locomotion and Sensing Test Arena” is located in H1: gates 51/52. The “Mobile Robot Test Arena” is in H6: gates 9 – 13.
Publications
(If you can not get access to the publication via the DOI link, click on [Preprint PDF] to get a preprint copy via ResearchGate)
[1] A. Birk, “The IUB Rescue Arena, a testbed for rescue robots research,” in Second IEEE International Workshop on Safety, Security, and Rescue Robotics (SSRR), Bonn, Germany, 2004. [Preprint PDF]
[2] A. Birk, K. Pathak, J. Poppinga, S. Schwertfeger, M. Pfingsthorn, and H. B{\”u}low, “The Jacobs Test Arena for Safety, Security, and Rescue Robotics (SSRR),” in WS on Performance Evaluation and Benchmarking for Intelligent Robots and Systems, Intern. Conf. on Intelligent Robots and Systems (IROS), 2007. [Preprint PDF]
[3] I. Varsadan, A. Birk, M. Pfingsthorn, S. Schwertfeger, and K. Pathak, “The Jacobs map analysis toolkit,” in Workshop on Experimental Methodology and Benchmarking in Robotics Research, Robotics Science and Systems (RSS), 2008. [Preprint PDF]
[4] I. Varsadan, A. Birk, and M. Pfingsthorn, “Determining Map Quality through an Image Similarity Metric,” in RoboCup 2008: Robot WorldCup XII, Lecture Notes in Artificial Intelligence (LNAI), Springer, 2009, pp. 355-365. https://doi.org/10.1007/978-3-642-02921-9_31 [Preprint PDF]
[5] A. Birk, “A Quantitative Assessment of Structural Errors in Grid Maps,” Autonomous Robots, vol. 28, pp. 187-196, 2010. https://doi.org/10.1007/s10514-009-9159-2 [Preprint PDF]
[6] A. Birk, “Using Recursive Spectral Registrations to Determine Brokenness as Measure of Structural Map Errors,” in IEEE International Conference on Robotics and Automation (ICRA), 2010. https://doi.org/10.1109/ROBOT.2010.5509322 [Preprint PDF]
[7] S. Schwertfeger, A. Jacoff, J. Pellenz, and A. Birk, “Using a Fiducial Map Metric for Assessing Map Quality in the context of RoboCup Rescue,” in IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Kyoto, 2011, pp. 1-6. https://doi.org/10.1109/SSRR.2011.6106762 [Preprint PDF]
[8] S. Schwertfeger and A. Birk, “A Short Overview of Recent Advances in Map Evaluation,” in IEEE International Symposium on Safety, Security, Rescue Robotics (SSRR), College Station, Texas, 2012. https://doi.org/10.1109/SSRR.2012.6523906 [Preprint PDF]
[9] S. Schwertfeger and A. Birk, “Map evaluation using matched topology graphs,” Autonomous Robots, vol. 40, pp. 761-787, 2015. https://doi.org/10.1007/s10514-015-9493-5 [Preprint PDF]
[10] S. Schwertfeger and A. Birk, “Using Fiducials in 3D Map Evaluation,” in IEEE International Symposium on Safety, Security, Rescue Robotics (SSRR), 2015. https://doi.org/10.1109/SSRR.2015.7442997 [Preprint PDF]