Robots

BlueROV++
The BlueROV++ is an underwater robot based on the BlueRobotics BlueROV2 platform with substantially modified electronics and software to support intelligent autonomous functions. It is an important vehicle in the context of multiple projects including the underwater exploration of the WW-II submarine bunker Valentin, the investigation of unconstrained synthetic aperture sonar (USAS), or the generation of 3D data from a Forward Looking Sonar. [more]
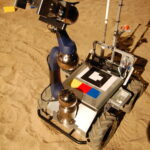
Lunatic 2
While originally developed for planetary exploration in the context of the DLR SpaceBot Cup, the Lunatic 2 robot is a mobile manipulation platform that can be used for various application scenarios. Examples include automation in logistics or response robotics, e.g., the deployment of sensors for vibration analysis for bridge inspection. Lunatic 2 is based on a Clearpath Husky mobile platform on which a Schunk Powerball LWA with Schunk gripper and 6-dof torque-force-sensor are integrated. The system integration done by the robotics group also include substantial on-board computation power and a rich sensor payload, e.g., a Velodyne HDL-32. [more]

Intelligent Deep-Sea Vision System
The intelligent deep-sea vision system is a configurable multi-view camera system with substantial on-board computation power developed within the DexROV project. The system consists of cameras in deep-sea rated housings that can be daisy-chained, e.g., in a stereo-camera set-up, to a compute bottle where in-situ, real-time processing of the data takes place to support intelligent autonomous functions to ease ROV-operations. This is of interest for application scenarios in the context of for example Oil- and Gas-Production (OGP) that increasingly takes place in the deep-sea. Demonstrations and field trials include the integration and operation of the system on an Apache ROV deployed from the Janus II research vessel. [more]

Muddy Waters I & II
Muddy Waters is an Autonomous Underwater Vehicle (AUV), respectively it can also be used as Autonomous Surface Vehicle (ASV) with floatation bodies mounted on its side. In the ASV mode, it has additional payload compared to the AUV mode and it has also less drag, i.e., longer operation time. The first version, i.e., Muddy Waters I, was developed from 2009 on in the Co3-AUVs project where it was used among others for early work on Underwater Human Robot Interaction. From 2018 on, a second version with similar core design but completely updated electronics, sensors, and computation power was developed, which was used among others for underwater bridge inspection and which is still in use. [more]

Aerial Response Robot
The Aerial Response Robot or Search and Rescue (SAR) drone was part of early research starting already in 2002 in the CUB Robotics Group on using Unmanned Aerial Vehicles (UAV), respectively Micro Aerial Vehicles (MAV) for SAR missions. The related research includes the autonomous mapping of areas or the exploration of a disaster site in cooperation with an Unmanned Ground Vehicle (UGV). From 2006 on, the according research involved a cooperation with AirRobot and a drone from that company was used in multiple competitions and field trials, e.g., the “European Land Robots Trials (ELROB)” or the “Response Robot Evaluation Exercises (RREE)” in Disaster City in Texas. [more]

Lead Zeppelin
The “Lead Zeppelin” is an Autonomous Underwater Vehicle (AUV) developed in cooperation with ATLAS Elektronik from 2006 on. It is designed for basic research and education purposes. The “Lead Zeppelin” has among others participated in the Student Autonomous Underwater Challenge – Europe (SAUC-E) in 2006. [more]

RuggedBot
The ruggedbot or short rugbot type of robot is an in-house development for Safety, Search, and Rescue Robotics based on the CubeSystem, a collection of hardware and software components for fast robot prototyping. Rugbots are tracked vehicles that are lightweight (about 35 kg) and have a small footprint (approximately 50 cm x 50 cm). They are very agile and fast on open terrain. An active flipper mechanism allows rugbots to negotiate stairs and rubble piles. [more]

Papa & Mother Goose and the Goslings
The development of papa goose started in 2001 with the very start of robotics activities at Constructor University. From 2002 on, it was assisted by mother goose, a smaller tracked robot. The nicknames papa- and mother-goose are derived from the fact that they cooperate with a set of small autonomous robots called the goslings. The robots were designed and used in the context of Safety. Security, and Rescue Robotics (SSRR) using the CubeSystem. They participated among others in RoboCup Rescue competitions. The geese were later on replaced by the RuggedBot design for response robots. [more]
Labs
Robotics Prototyping Lab
The prototyping lab is equipped for the development of robots and robot components. It has several electronics workbenches, basic facilities for mechanical processing and assembly, as well as several PC workplaces for programming and experimenting with the robots. [more]
Safety, Security, and Rescue Robotics (SSRR) Test Arenas
The robotics group is equipped with special testing facilities for response robots. One test-site is the so-called basic rescue arena. This testbed consists of three different levels, the so-called yellow, red, and the orange zone. This approach is modeled after the test arena design from the American National Institute for Standards and Technology (NIST), which is based on data from real disasters and accidents. [more]