Overview
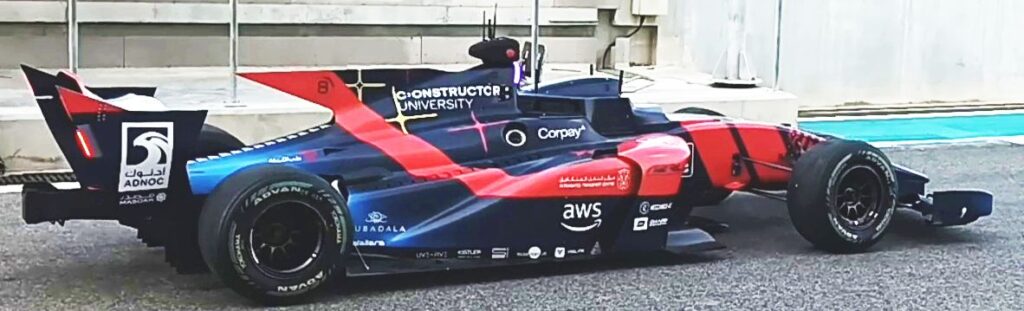

The robotics group at Constructor University is since many years looking into the scientific aspects of autonomous driving. Though this has only recently become one of the main application domains since Constructor is actively engaged in autonomous high-velocity driving using a full-sized race-car driving on a Formula-1 track.
While this may sound like an entertainment spectacle, it is serious academic work as the high-velocity driving pushes the hardware and the methods used for autonomous driving to their limits – and occasionally beyond. This substantially helps to advance the state of the art in autonomous driving, i.e., to derive new scientific insights and to make autonomous driving, respectively components in Advanced Driver Assistance Systems (ADAS) in general, safer.
The main interests of the robotics group in the context of autonomous driving are related to the aspects of machine perception. There are some well two decades of experience in the Constructor robotics group of working with computer vision as well as with lidar on mobile platforms as basis for object detection, mapping, navigation, and control. This includes work on system integration up to conceptual contributions in form of new methods and approaches.
Machine Perception with Radar
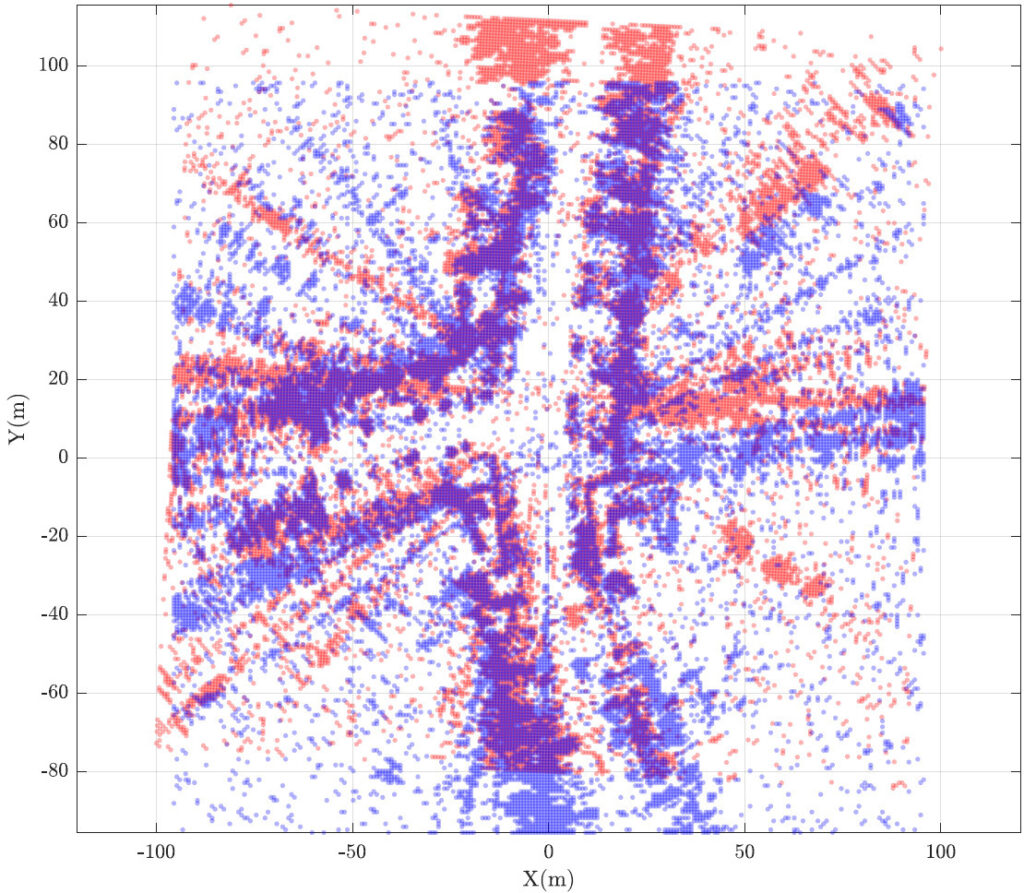
In recent ongoing work, new methods from registration in the frequency domain that have originally been developed by the robotics group for handling underwater data from sonar, have been carried over to be used on radar. Automotive radar is in general a very interesting sensor for ADAS as it is less costly then, e.g., lidar and it is less affected by weather conditions then vision or lidar. Initial results of our work on using our methods for sonar processing on automotive radar data are very promising. The underlying concepts and methods of processing in the frequency domain can in general cope very well with high amounts of noise, partial overlap, occlusions and structural disturbances, which makes them well suited for data from automotive radar.
Please stay tuned for some updates on this topic, e.g., in form of publications that should appear soon.
Early Work
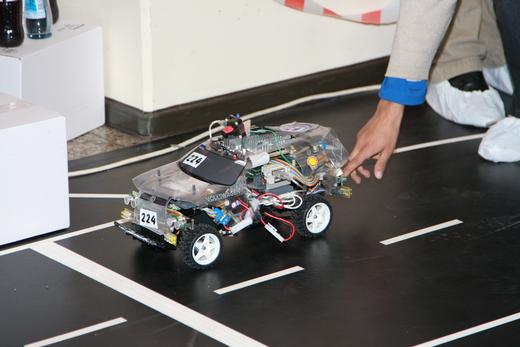
As mentioned already above, the Constructor robotics group is actively following the scientific developments in autonomous driving since the early days of its activities including teaching and the participation in competitions. For example, the group participated, then still under the previous name Jacobs University of our institution, in the Carolo Cup in 2008.
The team implemented lane detection and following, obstacle avoidance, as well as parallel parking on a scaled-down vehicle that was based on a kit provided by the competition organizers. The lane detection and following was solely based on computer vision. The obstacle avoidance was divided into a “long” range part using vision and a “near” range part based on simple ultrasound distance sensors. The distance sensors were also used for the parallel parking. The implementation of the overall autonomy was based on work on autonomous mobile robots, especially response robots.