Overview
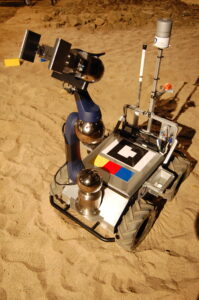
While originally developed for planetary exploration in the context of the DLR SpaceBot Cup, the Lunatic 2 robot is a mobile manipulation platform that can be used for various application scenarios. Examples include automation in logistics or response robotics, e.g., the deployment of sensors for vibration analysis for bridge inspection. Lunatic 2 is based on a Clearpath Husky mobile platform on which a Schunk Powerball LWA with Schunk gripper and 6-dof torque-force-sensor are integrated. The system integration done by the robotics group also include substantial on-board computation power and a rich sensor payload, e.g., a Velodyne HDL-32.
under construction