The Robot Ecosystem
The basic idea of this ecosystem was developed by Luc Steels and David McFarland. The implementation and the further development of the ecosystem was done at the Artificial Intelligence Laboratory (AI-lab) of the Vrije Universiteit Brussel (VUB). The basic version of this artificial ecosystem consists of
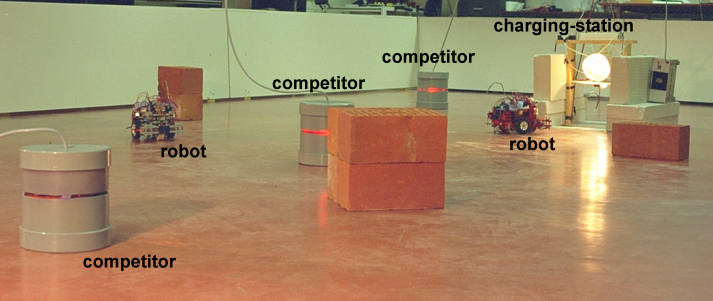
- the charging-station where robots can autonomously re-load their batteries. The charging-station is equipped with a bright white light on top as a kind of land-mark, respectively beacon.
- simple mobile robots, which are equipped with basic behaviors for, e.g., obstacle avoidance. In addition, they do phototaxis towards the charging station and toward
- the competitors, which are boxes housing lamps connected to the same global energy source as the charging station. The modulated light of these lamps can be dimmed by other inhabitants of the ecosystem, i.e., the mobile robots, by knocking against the boxes. The competitors establish a kind of working task which is paid in energy.
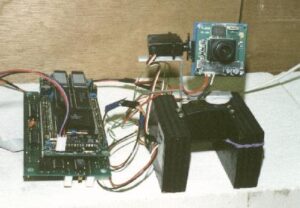
The mechanical design of the different robots in the ecosystem is very simple and imprecise, as it is based on on toy-construction-kits like LEGO and Fischertechnik. But on the electronics side, the robots are equipped with elaborated on-board control-computers.
The software controlling the autonomous operation of the robots is based on the behavior-oriented approach. A behavior is a software-module that establishes a close link between sensor values and motor activations. All behaviors run in parallel and their effect on the motors is simply added up. There is no global control or arbitration mechanism.
This leads to so-called emergent phenomena, which are kind of side-effects from the superposition of different behaviors and their interactions with the robots environment. For example, the task for moles to “fight” the competitors is not explicitly programmed into the robots. Instead, it emerges out of the phototaxis towards the modulated light and the touch-based obstacle-avoidance. Due to the phototaxis, the robots are kind of attracted by the competitors. Consequently, they drive towards them, they bump into them, the touch-based obstacle-avoidance causes them to retract, they are attracted again, and so on. As a result, a robot bumps several times into a competitor until the competitor dims and the attraction is gone. Note, that the number of bumps is not explicitly programmed and that there is an automatic adaptation to the “strength” of the competitors.
An extended version of the ecosystem features an additional inhabitant, the so-called “head”. It consists of a camera on a pan-tilt-unit and it has quite some vision capabilities. As it is not mobile, the head cannot access the charging-station and it is forced to cooperate.
Some Research Topics in the Ecosystem
Though the basic idea of this artificial ecosystem is rather simple, it provides many possibilities for research on various subjects related to autonomous systems, including basic economic concepts, learning, heterogeneous agents, and many more. The ecosystem can for example be modelled by an N-player prisoners’ dilemma and it can hence serve for the study of the evolution, respectively learning of cooperation. Below a few references related to Andreas Birk‘s work in this ecosystem research at the VUB AI-lab and from 2001 on at Constructor University, which at the time was still called International University Bremen (IUB). This includes especially work on the robots implementation using the CubeSystem from 1997 on, aspects of behavior-oriented programming, and the origins of cooperation as well as of trust.
References
(If you can not get access to the publication via the DOI link, click on [Preprint PDF] to get a preprint copy via ResearchGate)
[1] A. Birk and J. Wiernik, “Behavioral AI Experiments and Economics,” in 12th European Conference on AI, ECAI-96 Workshop: Empirical AI Budapest, Hungary, 1996.
[2] T. Belpaeme and A. Birk, “On the Watch,” in 30th International Symposium on Automative Technology and Automation (ISATA), Florence, Italy, 1997.
[3] A. Birk, “Autonomous Recharging of Mobile Robots,” in 30th International Symposium on Automative Technology and Automation (ISATA), Florence, Italy, 1997. [Preprint PDF]
[4] A. Birk, “Behavior-based Robotics, its scope and its prospects,” in 24th Conference of the IEEE Industrial Electronics Society (IECON), 1998. https://doi.org/10.1109/IECON.1998.724059 [Preprint PDF]
[5] A. Birk, “Robot Learning and Self-Sufficiency: What the energy-level can tell us about a robot’s performance,” in Learning Robots, EWLR 1997. vol. 1545, Springer, 1998. https://doi.org/10.1007/3-540-49240-2_8 [Preprint PDF]
[6] A. Birk, “Learning of an Anticipatory World-Model and the Quest for General versus Reinforced Knowledge,” in First International Conference on Computing Anticipatory Systems, 1998. https://doi.org/10.1063/1.56312 [Preprint PDF]
[7] A. Birk and T. Belpaeme, “A Multi-Agent-System based on Heterogeneous Robots,” in Collective Robotics, CRW’98, Springer, 1998. [Preprint PDF]
[8] A. Birk and J. Wiernik, “Economic aspects of a real-world ecosystem featuring several robot species,” in 2nd Workshop on Economics with Heterogeneous Interacting Agents (WEHAI), Ancona, Italy, 1998.
[9] A. Birk, “Boosting Cooperation by Evolving Trust,” Applied Artificial Intelligence Journal, vol. 14, September 2000. https://doi.org/10.1080/08839510050127542 [Preprint PDF]
[10] T. Belpaeme and A. Birk, “Hungry Robots,” Crossroads (XRDS), vol. 8, 2001. https://doi.org/10.1145/567155.567160 [Preprint PDF]
[11] A. Birk, “Learning to Trust,” in Trust in Cyber-Societies. vol. 2246, Springer, 2001, pp. 133-144. https://doi.org/10.1007/3-540-45547-7_8 [Preprint PDF]
[12] A. Birk and H. Kenn, “Efficient Scheduling of Behavior-Processes on Different Time-Scales,” in Proceedings of the International Conference on Robotics and Automation, ICRA’2001, IEEE Press, 2001. https://doi.org/10.1109/ROBOT.2001.932569 [Preprint PDF]
[13] A. Birk, H. Kenn, and L. Steels, “Programming with Behavior Processes,” International Journal of Robotics and Autonomous Systems, vol. 39, pp. 115–127, 2002. https://doi.org/10.1016/S0921-8890(02)00198-7 [Preprint PDF]
[14] A. Birk and J. Wiernik, “An N-Players Prisoner’s Dilemma in a Robotic Ecosystem,” International Journal of Robotics and Autonomous Systems, vol. 39, pp. 223–233, 2002. https://doi.org/10.1016/S0921-8890(02)00206-3 [Preprint PDF]
[15] A. Birk, “The Evolution of Cooperation in Groups with up to 25 Agents,” in The Third IASTED International Conference on Artificial Intelligence and Applications, AIA’03, Benalmadena, Spain, 2003. [Preprint PDF]
[16] A. Birk, “Fast Robot Prototyping with the CubeSystem,” in International Conference on Robotics and Automation (ICRA), 2004. https://doi.org/10.1109/ROBOT.2004.1302539 [Preprint PDF]
[17] A. Birk, “Learning to Cooperate via a Selectionist Algorithm,” in Artificial Intelligence and Applications, AIA’04, Innsbruck, Austria, 2004. [Preprint PDF]