Link to the English version

Constructor Robotics, damals noch unter dem vorherigen Namen Jacobs University für unsere Institution, war ein Partner in dem BMBF-project Verletzlichkeit von Transportinfrastrukturen, sowie Warnung und Evakuierung im Falle von großräumigen Hochwasserereignissen im Inland (FloodEvac) mit einem Projekt zur Unterwasserinspektion von Brücken durch einen Roboter.
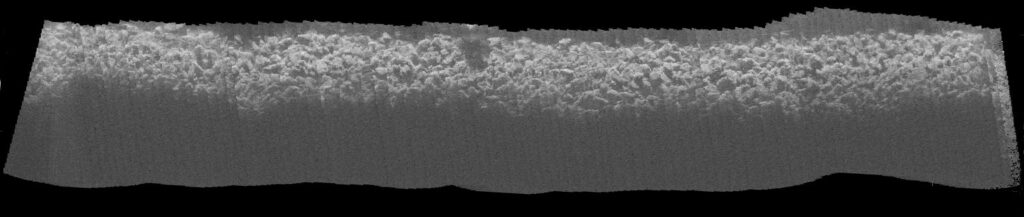
Brücken sind kritische Transportinfrastrukturen bei Fluten. Sie sind sehr wichtig für die Katastrophenlogistik und Evakuierungen, aber gleichzeitig werden sie von der Flut oft erheblich in Mitleidenschaft gezogen. Der Stand der Technik zur Beurteilung möglicher Schäden beruht auf Inspektionen oberhalb der Wasserlinie – was eine hohe Unsicherheit zur Folge hat – oder in der Verwendung von Tauchern – was sehr hohe Risiken für die Taucher beinhaltet und nur zu informellen Berichten über die Situation unter Wasser genutzt werden kann. Dieses Teilvorhaben beschäftigte sich daher mit der Nutzung eines neuartigen Konzepts eines Marineroboters zur effizienten und sicheren Inspektion von Brücken im Kontext von Flutkatastrophen. Dafür wurde ein Gesamtsystem aus einem Unmanned Underwater Vehicle (UUV) mit bildgebenden Sonar und ein darauf aufbauendes Softwarepaket entwickelt. Neben den Arbeiten zur Systementwicklung und -integration, wurden Methoden und Software entwickelt, die zur Aufarbeitung der Sonardaten durch Verfahren zur Signalverbesserung dienen. Darauf aufbauend wurden sowohl intelligente autonome Teilfunktionen zur Bedienerassistenz als auch Methoden zur räumlichen Informationsintegration, d.h. zur Erstellung von lokalen Karten, erfolgreich erforscht. Es konnte u.a. in Feldversuchen gezeigt werden, dass mit dem Ansatz Unterwasserkarten erstellt werden konnten, in denen mögliche Verkolkungen oder Verklausungen an Brücken erkannt werden können. Dies ist insbesondere bei extrem schlechten Sichtverhältnissen möglich, die die Standardbedingungen bei deutschen Gewässern darstellen, d.h. unter Bedingungen die eine visuelle Inspektion durch Taucher oder mit Kameras unmöglich machen.
Wichtige Projektergebnisse waren unter anderem das Erstellen von Karten durch Registrierung der Daten eines bildgebenden Sonars mit spektralen Methoden, d.h. ohne Navigationsinformationen von GPS oder anderen Sensoren. Diese Karten können z.B. zur Erkennung von Unterspülungen oder Verklausungen genutzt werden.
Publikationen
Unter anderem sind folgende Publikationen von Constructor Robotics mit direktem Bezug zum Projekt entstanden (über einen Click auf [Preprint PDF] ist eine Version via ResearchGate verfügbar):
[1] C. A. Mueller, T. Fromm, H. Buelow, A. Birk, M. Garsch, and N. Gebbeken, “Robotic Bridge Inspection Within Strategic Flood Evacuation Planning,” in IEEE Oceans, Aberdeen, UK, 2017. https://doi.org/10.1109/OCEANSE.2017.8084668 [Preprint PDF]
[2] M. Benndorf, T. Haenselmann, M. Garsch, N. Gebbeken, C. A. Mueller, T. Fromm, T. Luczynski, and A. Birk, “Robotic bridge statics assessment within strategic flood evacuation planning using low-cost sensors,” in IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR), 2017. https://doi.org/10.1109/SSRR.2017.8088133 [Preprint PDF]