Mapping with underwater robots, i.e., Remotely Operated Vehicles (ROV) or Autonomous Underwater Vehicles (AUV), is in general a difficult task due to the limitations in localization and environment perception in the underwater domain. This holds especially when using sonar, i.e., a sensor that tends to be noisy and that is limited by low spatial and temporal resolution. The Constructor robotics group made some early contributions to this area [1][2][3], which are conceptually interesting, still competitive solutions for the underlying problem.
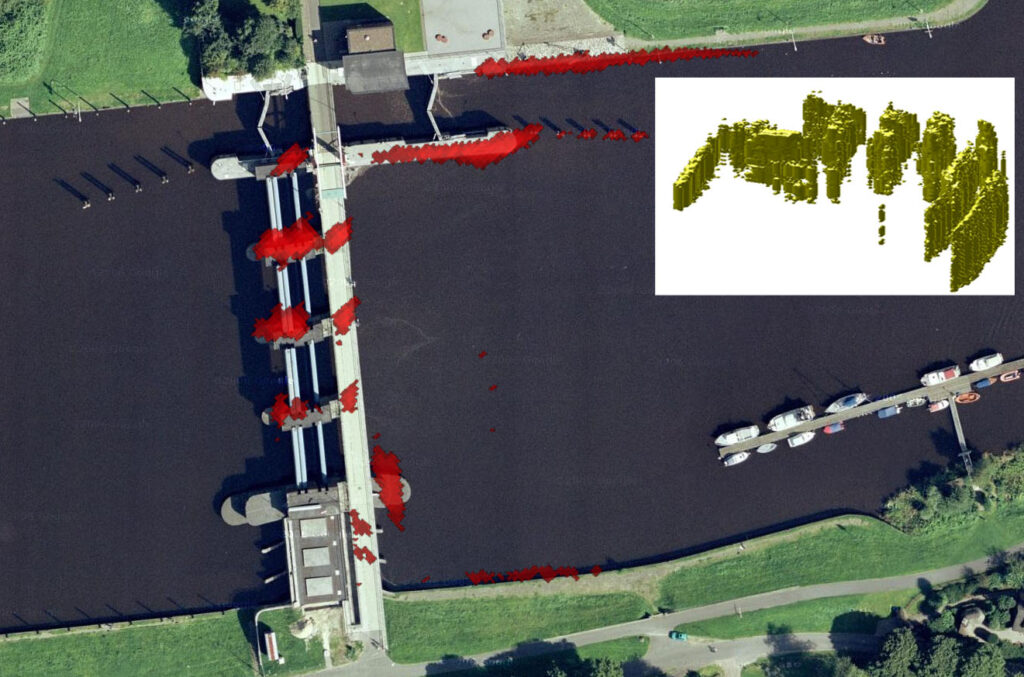
In [1], infinite planes are fitted into the sonar data and an efficient registration method within 3D-Plane-SLAM is used. The fitting of the infinite plane is a very efficient option to handle the noise in the sonar data. Also, the 3D registration using planes is very efficient and robust, i.e., it can cope very limited overlap of the scans, occlusions, and dynamics like fish moving in the scans. No other sensor data is used in the experiments, i.e., no navigation information. Last but not least, the results are based on registration only, i.e., the SLAM-backend is not used. The caveat is that this approach works best in manmade environments like harbors, locks, or floodgates, which have some planar structures within them.
This disadvantage is not the case in [2] where a registration method is used for 3D underwater mapping that can cope with arbitrary environment data. Concretely, registration within the frequency domain is used in form of Spectral Registration with Multilayer Resampling (SRMR). This approach can benefit from the general advantages of using the frequency domain, which lead to robust results with challenging sensor data, i.e., with noise, partial overlap, occlusions, etc. Also in [2], only the sonar data and no navigation, i.e., no other sensor information is used to generate the 3D underwater map.
To extent the approach from [2] to full SLAM, an uncertainty estimation for the registration is required, which is introduced in [3]. This uncertainty estimation uses the peaks und their neighborhoods, which indicate in the correlations in the registration the parameters of the underlying spatial transformation. The options investigated in [3] are of general interest beyond sonar processing or underwater mapping, and [3] is up to our knowledge the first work on uncertainty estimates for registration in the frequency domain.
Publications
(If you can not get access to the publication via the DOI link, click on [Preprint PDF] to get a preprint copy via ResearchGate)
[1] K. Pathak, A. Birk, and N. Vaskevicius, “Plane-Based Registration of Sonar Data for Underwater 3D Mapping,” in IEEE International Conference on Intelligent Robots and Systems (IROS), Taipeh, Taiwan, 2010, pp. 4880 – 4885. https://doi.org/10.1109/IROS.2010.5650953 [Preprint PDF]
[2] H. Bülow and A. Birk, “Spectral Registration of Noisy Sonar Data for Underwater 3D Mapping,” Autonomous Robots, vol. 30, pp. 307-331, 2011. https://doi.org/10.1007/s10514-011-9221-8 [Preprint PDF]
[3] M. Pfingsthorn, A. Birk, and H. Bülow, “Uncertainty Estimation for a 6-DoF Spectral Registration method as basis for Sonar-based Underwater 3D SLAM,” in International Conference on Robotics and Automation (ICRA), Saint Paul, Minnesota, 2012. https://doi.org/10.1109/ICRA.2012.6224731 [Preprint PDF]